12Dec
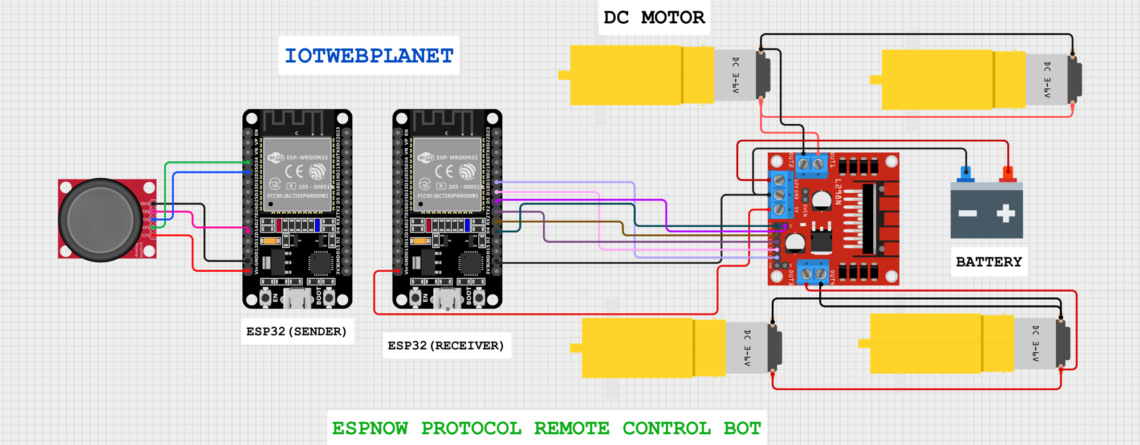
ESP32 Joystick Controlled Robot Using ESP-NOW Protocol & L298N Motor Driver
ESP32 Joystick Controlled Robot Using ESP-NOW Protocol & L298N Motor DriverWireless bot control with speed adjustment via joystick tilt📝 IntroductionIn this project, we built a wireless robotcontrolled via a joystick and two ESP32 boardsusing the ESP-NOW communication protocol. Unlike Wi-Fi or Bluetooth, ESP-NOW enables fast, peer-to-peer data transfer between ESP32 devices using MAC addresses, making it ideal for real-time robot control.The robot’s movement and speed are controlled through analog joystick input, and an L298N motor driver handles motor driving on the receiving end.🔧 Hardware UsedComponentDescription2x ESP32One for sending...